�� �Q�ܲ����M��
1���Q��������
��ʹ�ܵ�����������������֧�б۵���������ɢ���D���^�d�ɣ����b���̡�
�����c�����b��r���Բ�����˨�B�ӻӡ�
2���ȱ��i�o��
�����ڱ�������λ�Õr�������i�o��ԓλ�ã��@�ӿ��Է�ֹ�����L�h������Dz����ˆT������ʹ�ۻ��܇������ܓp��
3���ӿڣ��DZ��c�ܾ����B�Ӳ��֣�һ��ӿ��c�ܾ�֮�g���÷��m�B�ӡ�
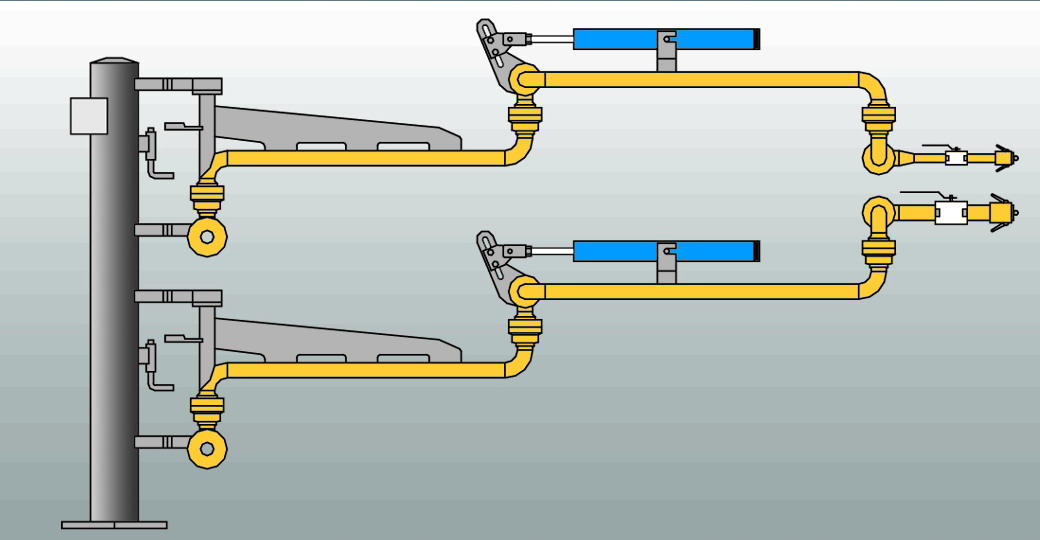
4�����D���^
���ڱ۵����D�\�ӣ��M������ʹ�÷���(���j����)����Ҏ�Q�ܲ���4ֻ��5ֻ���D���^���Ԍ��F���S�\�Ӽ����m�ӿڵČ��ӡ�
5���ȱۣ�
�B�ӽӿ��c���֮�g�IJ��֣�����ˮƽ���ϻ��D��
6����ۣ�
���Q�ܵ����w���֣����Ԍ��Fˮƽ����360�㣬
��ֱ����75�㷶���Ļ��D��
7������ܣ�AL1412/3�ͣ���
���ò��P䓽���ܛ�ܻ�PVCܛ�܌����]�l�Ě��w���|��
8�����ܣ�
���F�bж�������܇�ȣ��X�Ͻܿ˷�����|�����c��܇��ײ���ܮa����Σ����
9��ƽ��ϵ�y��
����ƽ����ۼ����ܵ��������@��ʹ�ñ۲����`��p�ɡ�ƽ��ϵ�y�鏗�ɸף��׃ȏ��ɞ鉺�s���ɡ�
10.��ն�·�y/�Ś��y��
��ն�·�y�_��������|���Q�����ſգ��Ś��y����ж܇�Q�ܴ��܃Ț��w�ų���
11. ��Һλ�����x����
Һλ̽�^���b�ڴ����^��������܇��Һ�w���|�ӽ��ڕr���Ѳ����ˆT�P�]�y�T�����c�����Һ�y�����ӡ� |
|